






电动葫芦的工作原理是:先发动起升电动机,把重物起升到合适的高度,再发动运转电动机把重物运到的方位,运转小车在单工字钢梁下行走。行走时选用一个电动机驱动运转小车两边的车轮。因为行走速度比较小,因而运转小车一般不设制动组织。运转小车内行走时,为了避免重物发生下降,在起升位置上设置了一个电磁制动器。制动是依托绷簧的压力把内、外盘压紧,原理与冲突离合器类似,松开时运用电磁铁通电今后吸住外盘而使内、外盘松开。电磁制动器的电路与起升电机的电路并联,因而只需起升电机一发动,电磁制动器松开,使重物上、下升降自若;当电动机关机时,则电磁制动器也胡跟着断电,电磁吸引力会消失,在绷簧的压力效果下,表里盘紧紧压住,起到制动的效果。

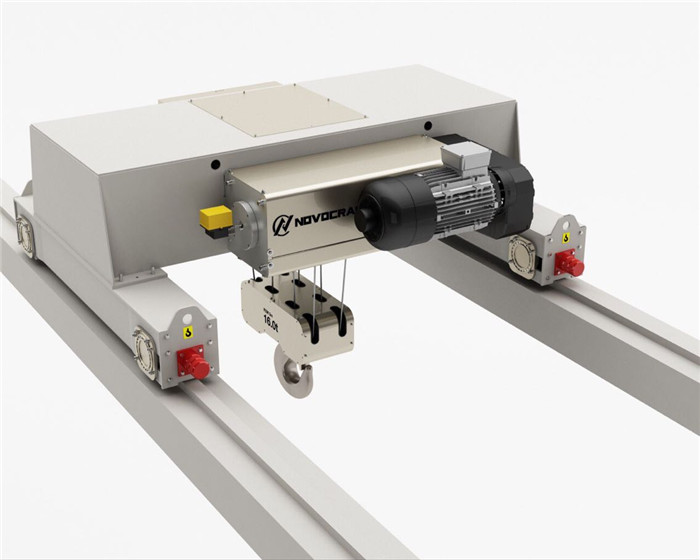
CDW弯道电动葫芦是CD1型电动葫芦的派生系列,具有比CD1型电动葫芦更小的转弯曲率半径,适合在曲率半径及空间狭窄的场合使用。

CD1、MD1型电动葫芦是一种轻小型起重设备,具有结构紧凑、重量轻、体积小、零部件通用性强、操作简便等优点。减速器采用硬齿面传动设计,寿命长,机械。电机采用锥形转子制动电机,具有上下双向安全限位装置。MD型电动葫芦具有双速和慢速两种起升速度,起吊平稳准确。主要结构有减速器,运行机构,卷筒装置,吊钩装置,联轴器,慢速驱动装置,软缆电流引入器,限位器,电机采用锥形转子电动机,集动力与制动力于一体,因此葫芦具有体积小,自重轻,操作简单。




 在线客服
在线客服 13958019073
13958019073 1292755161@qq.com
1292755161@qq.com


